Tagasisidesüsteemil on tavaliste süsteemide ees mitmeid eeliseid. See aitab parandada vooluahela väljundvõimendust ja suurendab ahela lineaarset reaktsiooni. Samuti vähendab see peamiselt mürasignaalide tõttu tekkivate signaalimoonutuste tõenäosust.
Tagasisidesüsteeme kasutatakse enamasti võimendiahelates, väljundipõhistes juhtimissüsteemides ja ostsillaatoriahelates. Tagasisidesüsteeme on kahte tüüpi: Positiivne tagasiside ja Negatiivne tagasisidet. See artikkel keskendub palju viimast tüüpi tagasisidele.
Kiire ülevaade:
- Mis on negatiivse tagasiside süsteem elektroonikas
- Negatiivse tagasiside ringkond
- Negatiivse tagasiside edastamise funktsioon
- Negatiivne tagasiside operatsioonivõimendites
- Näide 1
- Näide 2
- Näide 3
- Positiivse ja negatiivse tagasiside süsteemide erinevus
- Negatiivse tagasiside süsteemi rakendused ja omadused
- Negatiivse tagasiside mõju ribalaiusele
- Järeldus
Mis on negatiivse tagasiside süsteem elektroonikas
Negatiivne tagasiside elektriahelas on juhtimismehhanism, mis stabiliseerib ja reguleerib elektriahela toiminguid. Integreeritud negatiivse tagasiside süsteemidega vooluringid võtavad väljundsignaali ja annavad selle sisendisse kui a faasiopositsiooni (ümberpööratud) signaal . See tagasisidesüsteem vähendab väljundsignaalide kõrvalekaldeid või vigu.
Negatiivset tagasisidet nimetatakse ka degeneratiivne tagasiside . Negatiivse tagasiside korral lahutatakse tagasisidena tulev väljundsignaal sisendi tugisignaalist. Väljundi tulemuseks on viga, mida nimetatakse tagasiside saamine . See pärast lahutamist genereeritud veasignaal muudab vastavalt süsteemi vastust. Kui süsteemi võimendus on positiivne, tuleb väljundist tulev tagasiside signaal lahutada sisendi tugisignaalist, et tagasiside jääks negatiivseks.
Kui negatiivne tagasiside on lahutatud võrdlussisendist, muudab see süsteemi stabiilsemaks. Oletame, et on olemas süsteem, mis näitab ebatavalist käitumist – selle muutuse vastu võitlemiseks genereerib süsteem väljundsignaali. See väljund- või tagasisidesignaal neutraliseerib sisendsignaali, muutes sisendit vastavalt, et kogu süsteem töötaks tõhusalt.
Negatiivse tagasiside ringkond
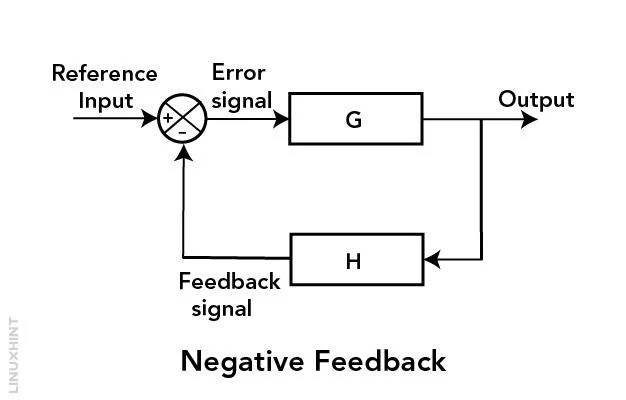
Negatiivse tagasiside ahel on illustreeritud alloleval pildil. Siin näete, et väljundsignaal viiakse tagasisidena tagasi sisendi poole. Sisendpoolel genereeritakse erinevus võrdlussignaali ja tagasiside signaali erinevuse vahel, mis seejärel juhib süsteemi edasi.
1. Komponendid : Ahel koosneb kahest põhikomponendist:
- Võimendi G võimendusega.
- Tagasiside teguriga β tagasisideahel.
Sisendsignaal on V sisse ja võimendi väljund on V välja .
2. Summeeriv ristmik : võimendi sisendis on summeerimisristmik (sageli kujutab seda ring, mille sees on miinusmärk). See ristmik lahutab võrdlussisendist tagasisidesignaali. Lahutatud osa on tagasisideteguri β ja väljundi Vout korrutis – seega on veasignaal V sisse – bV välja .
3. Tagasiside loop : see veasignaal (V sisse – bV välja ) on see, mis süsteemi juhib. See tähistab erinevust soovitud sisendi V vahel sisse ja tegelik väljund V välja skaleeritud tagasisideteguriga β.
4. Negatiivne tagasiside : Põhimõiste siin on negatiivne tagasiside. Kui väljund V välja muutused, mis on tingitud häiretest või muutustest sisendis V sisse veasignaal (Vin – βV välja ) luuakse. Arvutatud veasignaali võimendab võimendi võimendusega G ja suunatakse tagasi summeerimisristmikusse. Oluline on see, et see tagasiside on negatiivne, kuna see lahutatakse sisendist.
- Kui V välja suureneb (st süsteemi väljund läheb soovitatust kõrgemaks) tagasiside vähendab V tuues viga välja tagasi soovitud väärtuse suunas.
- Kui V välja väheneb (st süsteemi väljund langeb soovitust madalamale) tagasiside suurendab vea juhtimist V välja tagasi üles soovitud väärtuse suunas.
5. Üldine tagasiside võrrand : selle süsteemi üldist tagasiside võrrandit väljendatakse tavaliselt järgmiselt

See võrrand seostab väljundit V välja sisendile Vin ja tagasisidetegurile β läbi võimendi võimenduse G. See näitab, kuidas süsteem kasutab negatiivset tagasisidet, et reguleerida ja juhtida väljundit, et see sobiks soovitud sisendiga.
Negatiivse tagasiside edastamise funktsioon
Ülekandefunktsioon määratleb võrrandi, mis esindab suhet nii sisendi kui ka väljundi vahel. See ütleb meile, kuidas sisendi muutused väljundit mõjutavad. Negatiivse tagasiside korral on meil vahesignaal, mida tähistab Z. See vahesignaal tähistab väljundi ja sisendi erinevust.
Jaoks ülekandefunktsioon negatiivse tagasiside võrrandit, Z kasutatakse veasignaali või paranduse arvutamiseks, mis on vajalik süsteemi viimiseks soovitud väljundi väärtusele lähemale.
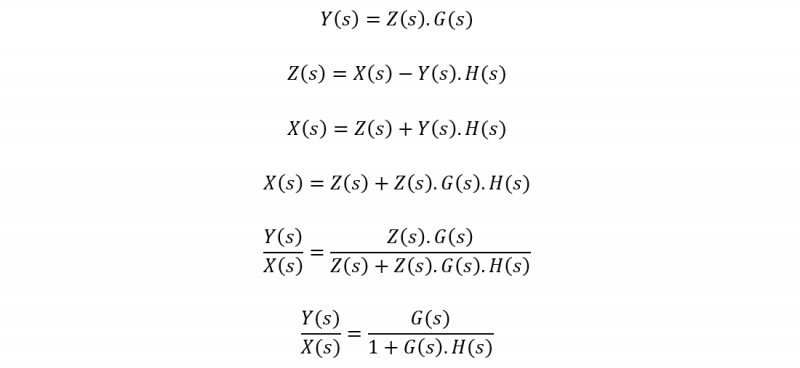
Järgmine plokkskeem näitab negatiivse tagasiside süsteemi. Seda diagrammi kasutades saame arvutada negatiivse tagasiside süsteemi ülekandefunktsiooni:
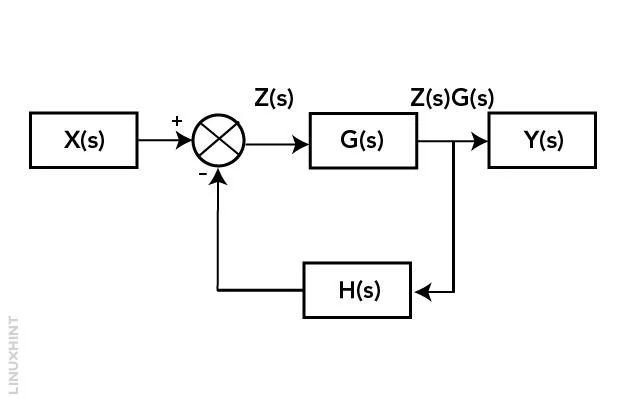
Negatiivse tagasiside süsteemi väljund on võrdne Y-ga:
Negatiivne tagasiside operatsioonivõimendites
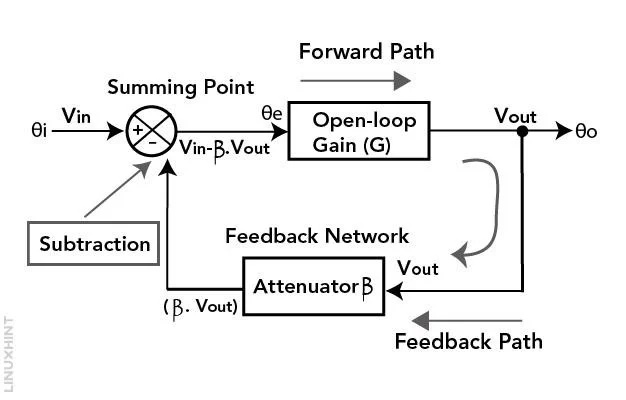
Negatiivse tagasiside konfiguratsioonis antakse osa operatsioonivõimendi väljundist (V) sisendi inverteerivale (-) terminalile. See väljundsignaal lahutatakse sisendviiteväärtusest. See aitab kontrollida ja stabiliseerida võimendi võimendust.
Kasutades operatsioonivõimendi vooluringis negatiivset tagasisidet, saate määrata soovitud võimendustaseme, säilitades samal ajal süsteemi stabiilsuse. Negatiivne tagasiside vähendab mittelineaarsust operatsioonivõimendi omadustes, muutes selle toimima ideaalsele käitumisele lähemal.
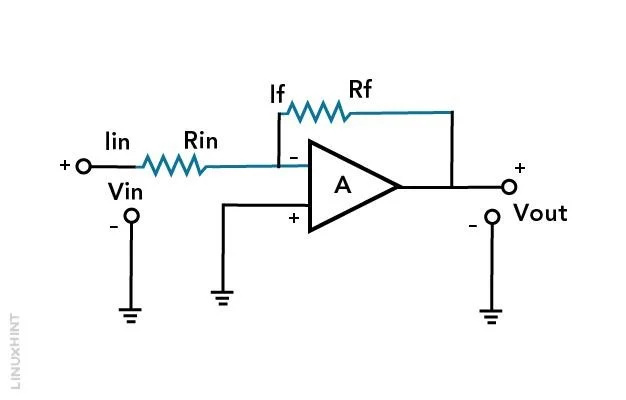
Negatiivse tagasisidega operatiivvõimendi (operatsioonivõimendi) vooluahel on konstrueeritud, kasutades keskse komponendina operatsioonivõimendit. Operatsioonivõimendil on kaks sisendit: üks on inverteeriv (-) ja teine mitteinverteeriv (+). Sellel on üks väljundklemm. Negatiivse tagasiside süsteemi jaoks kasutame op-võimendite inverteerivat külge.
See ahel sisaldab tavaliselt:
- Sisendtakisti (Rin), mis ühendab ühe allika operatsioonivõimendi inverteeriva (-) sisendiga.
- Tagasisidetakisti (Rf), mis ühendab operatsioonivõimendi väljundi inverteeriva (-) sisendiga.
- Ühendus operatsioonivõimendi väljundis oleva koormusega.
Kasu leiate Rf ja Rin suhte abil. See negatiivne tagasiside stabiliseerib ja kontrollib op-võimendi käitumist. See toimib, minimeerides pingete erinevust kahe inverteeriva ja mitteinverteeriva sisendi vahel. See tekitab nende vahel virtuaalse lühise. Selle tulemusel reguleerib op-amp oma väljundpinget selle tasakaalu säilitamiseks, muutes selle tõhusaks kontrollitud võimendusega võimendiks.
Näide 1: Suletud ahela võimenduse arvutamine
Süsteemi võimendus on 60 dB ilma tagasisideta. Negatiivse tagasiside murdosa on 1/20, leidke suletud ahela võimendus (dB-des), lisades negatiivse tagasiside.
Lahendus:
Suletud ahela võimendus negatiivse tagasisidega saadakse järgmise valemiga:

Sel juhul on avatud ahela võimendus 60 dB ja tagasiside osa on 1/20.

Seega, kui tagasiside murdosa on 1/20, on süsteemi suletud ahela võimendus 86,02 dB.
Näide 2: Pingevõimenduse arvutamine
Kui võimendi pingevõimendus on algselt 3000 (ilma tagasisideta) ja seejärel sisaldab negatiivset pinge tagasisidet tagasiside murdosaga mv = 0,01. Kui suur saab olema võimendi uus pingevõimendus?
Lahendus :
Võimendi pingevõimenduse arvutamiseks võite kasutada negatiivse pinge tagasisidega võimendi pingevõimenduse valemit:

Ülaltoodud valemis:
A f = Pinge võimendus tagasisidega
A = Pinge võimendus ilma tagasisideta
mv = tagasiside murdosa
Siin on meil:
Pinge suurenemine ilma tagasisideta (A) = 3000
Tagasiside murdosa (mv) = 0,01
Nüüd pane need väärtused valemisse:
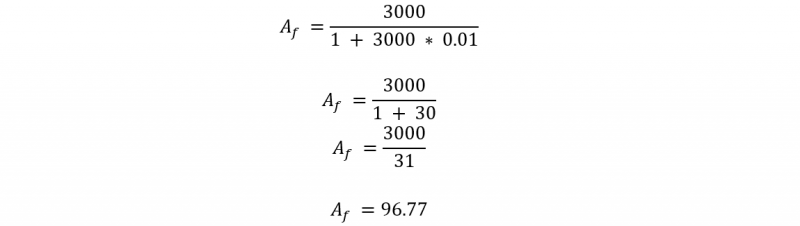
Seega on negatiivse pinge tagasisidega võimendi pingevõimendus ligikaudu 96,77.
Näide 3: Tagasisidetakistuste arvutamine
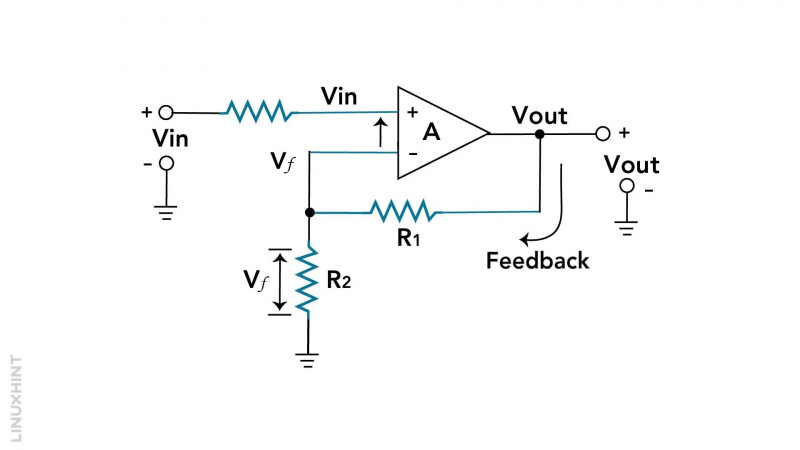
Määrake sobivad tagasisidetakistuse väärtused R 1 ja R 2 . Peate stabiliseerima mitteinverteeriva võimendi ahela, kasutades operatiivvõimendit, mille avatud ahela pingevõimendus (AVOL) on 220 000. Teie sihitud suletud ahela võimendus on 40.
Lahendus :
Üldine suletud ahela tagasiside võrrand on järgmine:

Tagasiside murdosa β saamiseks korraldage ülaltoodud võrrand ümber:
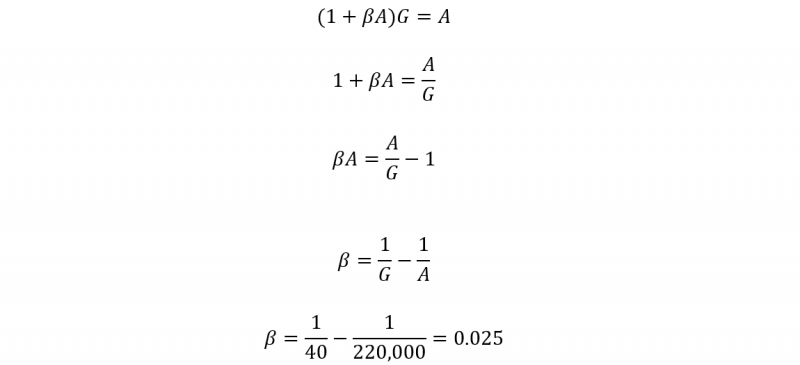
Sel juhul on avatud ahela võimendus liiga kõrge. Seega on tagasiside murdosa β ligikaudu võrdne suletud ahela võimenduse 1/G pöördarvuga. Kuna 1/A väärtus on liiga väike, on ligikaudu võrdne (0,025).
Takistid R1 ja R2 ülaltoodud konfiguratsioonis moodustavad jadapinge potentsiaalijagaja ahela. Suletud ahela pingevõimenduse leiate järgmiselt:

Oletame, et R2 väärtus on 1000 Ω (1 kΩ). Siis R väärtus 1 saab kirjutada kui
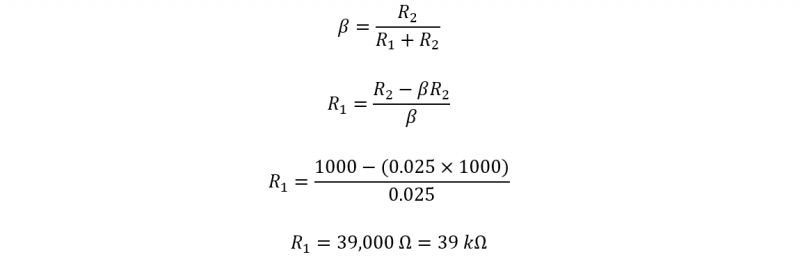
Seega, mitteinverteeriva võimendi ahela jaoks, mille võimendus on 40, peate valima R 1 39 kΩ ja R 2 1 kΩ.
Positiivse ja negatiivse tagasiside süsteemide erinevus
Positiivse ja negatiivse tagasiside süsteemide erinevuse leiate allolevast tabelist:
| Tagasiside tüüpide erinevused | Positiivne tagasiside | Negatiivne tagasiside |
|---|---|---|
| Definitsioon | Sellesse tagasisidesse lisatakse võrdlustagasiside ja sisendsignaalid. | Selle tüübi puhul lahutatakse väljundi tagasiside võrdlussisendist. |
| Nomenklatuur | Positiivne tagasiside või taastav tagasiside. | Negatiivne tagasiside või degeneratiivne tagasiside. |
| Eesmärk | Võimendab või suurendab signaali. | Stabiliseerib või reguleerib signaali. |
| Mõju süsteemile | Võib põhjustada ettearvamatut käitumist ja võnkumisi. | Soodustab prognoositavust ja püsiseisundi toimimist. |
| Hankige suund | Suurendab süsteemi võimendust. | Vähendab süsteemi võimendust. |
| Kasutamine | Helivõimendid ja lõõgastusostsillaatorid. | Operatsioonivõimendid (Op-Amps), tagasiside juhtimissüsteemid. |
| Stabiilsus | Sageli põhjustab see ebastabiilsust. | Parandab süsteemi stabiilsust. |
| Näiteks | Schmitti päästikud ja plätud. | Pingevõimendid ja temperatuuriregulaatorid. |
Negatiivse tagasiside süsteemi rakendused ja omadused
Negatiivse tagasiside süsteemidel on üldelektroonikas palju rakendusi. Need süsteemid parandasid süsteemi ebastabiilsust, süsteemi lineaarsust, sagedusreaktsiooni ja sammureaktsiooni. Negatiivse tagasiside süsteemide eeliste tõttu on paljudel elektroonika võimendi ahelatel negatiivse tagasiside süsteemid.
Mõned negatiivse tagasiside süsteemide üksikasjalikud kirjeldused on toodud allpool:
Stabiilsus : negatiivse tagasiside süsteem vähendab kõrvalekaldeid soovitud punktist, mille tulemuseks on stabiilsem süsteem. Näiteks termostaat tagab, et temperatuur püsib valitud väärtuse lähedal.
Täpsus: negatiivse tagasiside süsteemid parandavad süsteemi täpsust, minimeerides vigu. Võimendiahelas vähendab negatiivne tagasiside moonutusi ja annab väljundis stabiilsema signaali.
Ribalaiuse juhtimine : Võimendi ribalaiust saate juhtida ka negatiivse tagasiside süsteemi abil. See muudab need sobivaks mitmeks rakenduseks. Need rakendused hõlmavad heli võimendamist kuni raadiosagedusvõimenduseni.
Müra vähendamine : negatiivne tagasiside võib vähendada soovimatut müra ja häireid. Müra vähendamisel on helisüsteemide ja sideseadmete valdkonnas mitu rakendust.
Dünaamiline reaktsioon : negatiivse tagasiside süsteemidel on dünaamiline reageerimisvõime. Need süsteemid saavad kohandada vastavalt antud tingimustele. Dünaamilise reaktsiooni näide hõlmab auto püsikiiruse regulaatorit.
Negatiivse tagasiside mõju ribalaiusele
Bandwidth selgitab püsiva võimendusega võimendi töösagedusvahemikku. Suurema ribalaiusega süsteem tähendab, et võimendi suudab hakkama saada rohkemate sagedustega. Negatiivne tagasiside vähendab võimendi võimendust, andes väljundi sisendi poolel. See parandab süsteemi stabiilsust ja lineaarsust, kuid vähendab selle tulemusena ka süsteemi võimendust.
The negatiivse tagasiside mõju ribalaiusele oleneb rakendatud tagasiside tüübist ja hulgast. Üldiselt suurendab negatiivne tagasiside ribalaiust, vähendades süsteemi võimendust. Võimenduse ribalaiuse korrutis, mis on võimendi jõudluse mõõt, jääb tagasisidest sõltumata muutumatuks.
Näiteks , kaaluge ilma tagasisideta võimendi ahelat, mille ribalaius on 100 ja 10 kHz. Negatiivse tagasiside rakendamine võimenduse vähendamiseks 10-ni. See suurendab ribalaiust 100 kHz-ni. Võimenduse ribalaiuse korrutis on mõlemal juhul endiselt 100 × 10 kHz = 1 MHz.
Kuid negatiivne tagasiside mõjutab ka võimendi piirsagedusi. Need on sagedused, mille puhul süsteem langeb maksimaalsest väärtusest. Negatiivne tagasiside alandab piirsagedust ja tõstab ülemist piirsagedust. Selle tulemuseks on võimendi sagedusreaktsiooni kõvera laienemine. Negatiivse tagasiside netomõju ribalaiusele on kasumi vahetamine ribalaiuse vastu.
See tähendab, et negatiivse tagasiside rakendamine suurendab sagedusvahemikku, mida võimendi suudab taluda. Kuid see kõik tuleb selle võimendusteguri vähendamise hinnaga.
Järeldus
Negatiivse tagasiside süsteem saab väljundit juhtida või reguleerida, teenindades osa väljundist sisendi poolel. See tagasiside genereerib veasignaali, mis annab teile stabiilsema süsteemi. See veasignaal on dünaamiline ja juhib kogu süsteemi. Negatiivse tagasiside süsteem võib parandada süsteemi täpsust ja kontrollida ka ribalaiust. Seda tagasisidesüsteemi kasutatakse võimendiahelates, nagu mürasummutus või auto püsikiiruse regulaator. Lisateavet negatiivse tagasiside üksikasjaliku kirjelduse kohta leiate sellest artiklist.