PIR-i liikumisanduri (HC-SR501) tutvustus
PIR liikumisandur, tuntud ka kui a P assiivne I infrapuna S ensor on teatud tüüpi elektrooniline seade, mida tavaliselt kasutatakse inimese või looma olemasolu tuvastamiseks teatud vahemikus. HC-SR501 on populaarne PIR-liikumisanduri mudel, mis on tuntud oma töökindluse ja kasutuslihtsuse poolest.

See töötab passiivse infrapunadetektori abil, et tajuda temperatuurimuutusi, mis võivad olla põhjustatud inimese või looma liikumisest. Kui objekti liikumine tuvastatakse, saadetakse signaal sellistele seadmetele nagu turvasüsteem või valgustuse juhtpaneel. PIR-liikumisandureid kasutatakse sageli koduvalvesüsteemides, automatiseeritud valgustussüsteemides ja muudes rakendustes, kus on oluline tuvastada inimese või looma olemasolu.
PIR-i liikumisanduri (HC-SR501) töö
The HC-SR501 PIR-liikumisandur töötab temperatuurimuutuste tuvastamiseks passiivse infrapunadetektori abil. See on loodud tuvastama inimese või looma olemasolu teatud vahemikus, tavaliselt kuni umbes 8 meetri (26 jala) ulatuses.
Kui andur on tühikäigul, jälgib see pidevalt temperatuuri oma vaateväljas. Kui andur tuvastab temperatuurimuutuse, mis on põhjustatud inimese või looma liikumisest, saadab see signaali ühendatud seadmesse. Seda signaali kasutades saame genereerida vastuseid, näiteks lülitada valgus sisse või aktiveerida häire.

PIR-liikumisanduri pardal on kaks potentsiomeetrit, mille abil saab reguleerida tundlikkus ja Aja viivitus anduri kohta.
- Tundlikkus määrab, kui palju temperatuurimuutust on vaja PIR-anduri käivitamiseks. Seda saab määrata sõltuvalt liikumisest, mida peame tuvastama, näiteks hiire või lehtede liikumist.
- Aja viivitus määrab, kui kaua jääb andur aktiivseks pärast temperatuurimuutuse tuvastamist.
Pinout HC-SR501
PIR-anduri tihvt sisaldab:
- VCC : See on PIR-anduri toitepistik. Ühendage see 5 V toiteallikaga.
- GND : See on maandustihvt. Ühendage see toiteallika GND või negatiivse klemmiga.
- VÄLJAS : See on väljundviik. See saadab digitaalse signaali ühendatud seadmesse, kui andur tuvastab liikumise.
- Reguleerige viivitust : See on tundlikkuse reguleerimise tihvt. Selle abil saab anduri tundlikkust reguleerida.
- Reguleerige tundlikkust : see on viivituse reguleerimise tihvt. Seda saab kasutada aja reguleerimiseks, mille jooksul andur jääb aktiivseks pärast temperatuuri muutuse tuvastamist.
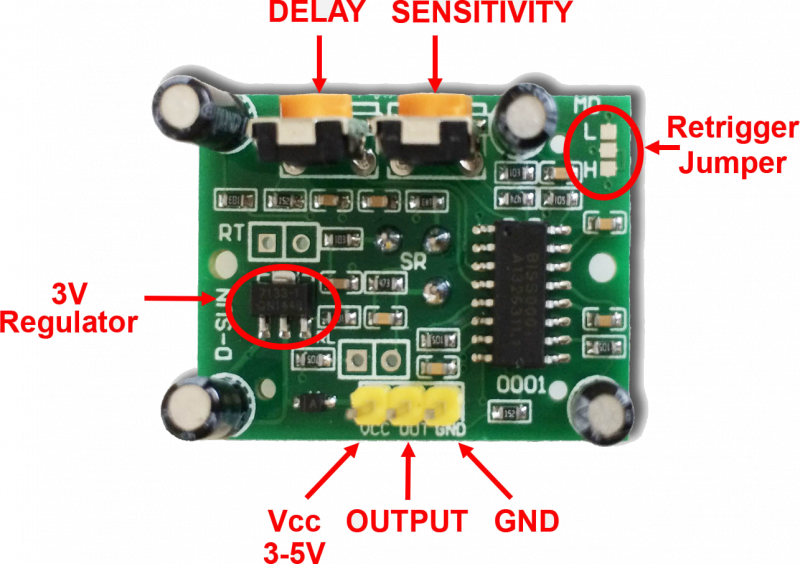
PIR HC-SR501-l on 3 väljundviiku. Kaks kontakti VCC ja GND on toiteviigud, samas kui keskmine või kolmas viik on mõeldud digitaalse päästikusignaali väljundiks.
Liidestav PIR-liikumisandur (HC-SR501) Arduino nanoga
PIR-liikumisanduri (nt HC-SR501) ühendamine Arduino Nano mikrokontrolleriga on lihtne protsess, mida saab teha vaid mõne komponendiga. Alustuseks ühendage PIR-anduri VCC ja GND tihvtid vastavalt Arduino Nano 5 V/VIN ja GND tihvtidega. Järgmisena ühendage PIR-anduri OUT-pistik Arduino Nano mis tahes digitaalsisendi viiguga.
Kui need ühendused on loodud, saate Arduino Nano abil lugeda PIR-anduri digitaalset väljundit ja teha soovitud toiminguid, näiteks lülitada sisse LED või saata teatise. Oluline on märkida, et PIR-i liikumisandur võib nõuetekohaseks toimimiseks vajada veidi kalibreerimist. Tavaliselt saab seda teha tundlikkuse ja viivituse seadistuste reguleerimisega pardal olevate potentsiomeetrite abil.
Nõutavad komponendid on:
- Arduino nano
- PIR liikumisandur (HC-SR501)
- LED
- 220 oomi takisti
- Ühendusjuhtmed
- Leivalaud
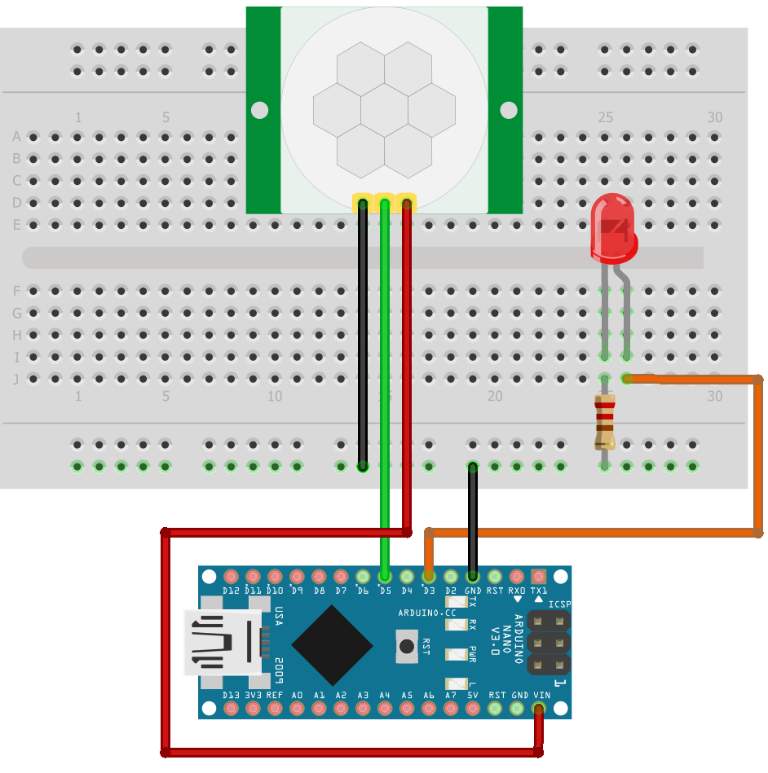
Skemaatiline
Antud pildil on näidatud Arduino Nano plaadiga PIR-anduri ühendusskeem:
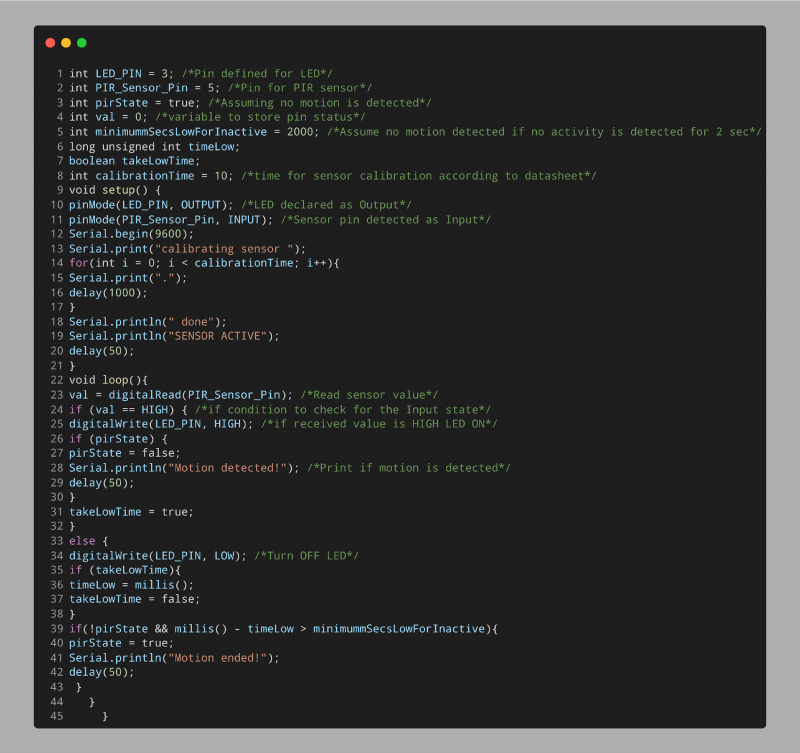
Kood
Avatud LÄHEB (Integreeritud arenduskeskkond). Valige Nano tahvel ja klõpsake pärast alloleva koodi kirjutamist üleslaadimisnupul.
int PIR_Sensor_Pin = 5 ; /* Pin jaoks PIR andur */
int pirState = tõsi ; /* Eeldusel, et liikumist ei tuvastata */
int val = 0 ; /* muutuja tihvti oleku salvestamiseks */
int minimummSecsLowForInactive = 2000 ; /* Oletame, et liikumist ei tuvastata kui tegevust ei tuvastata jaoks 2 sek */
pikk allkirjastamata int timeLow;
boolean takeLowTime;
int kalibreerimisaeg = 10 ; /* aega jaoks anduri kalibreerimine vastavalt andmelehele */
tühine seadistus ( ) {
pinMode ( LED_PIN, VÄLJUND ) ; /* LED deklareeritud nagu Väljund */
pinMode ( PIR_Sensor_Pin, INPUT ) ; /* Anduri tihvt tuvastati nagu Sisend */
Serial.begin ( 9600 ) ;
Serial.print ( 'kalibreeriv andur' ) ;
jaoks ( int i = 0 ; i minimumSecsLowForInactive ) {
pirState = tõsi ;
Serial.println ( 'Liikumine lõppes!' ) ;
viivitus ( viiskümmend ) ;
}
}
}
Kood algas PIR-anduri sisendviigu ja LED-i väljundviigu määratlemisega. Int muutuja val on määratletud. See muutuja salvestab PIR-i väljundviigu oleku.
Järgmiseks, kasutades pinMode funktsiooni LED ja anduri viik on määratletud vastavalt väljundiks ja sisendiks. Kui tingimust kasutatakse. Kui Arduino Nano saab andurilt KÕRGE sisendit, lülitub LED sisse. Samamoodi, kui liikumist ei tuvastata, saadetakse Arduinole LOW signaal, mille tulemusel lülitatakse LED välja.
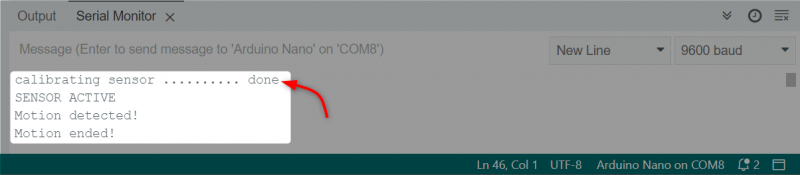
Väljund
Allpool kuvatakse väljund, kui PIR-andur tuvastab liikumise. Esimene andur kalibreerib ennast ja seejärel suudab tuvastada igasuguse liikumise.
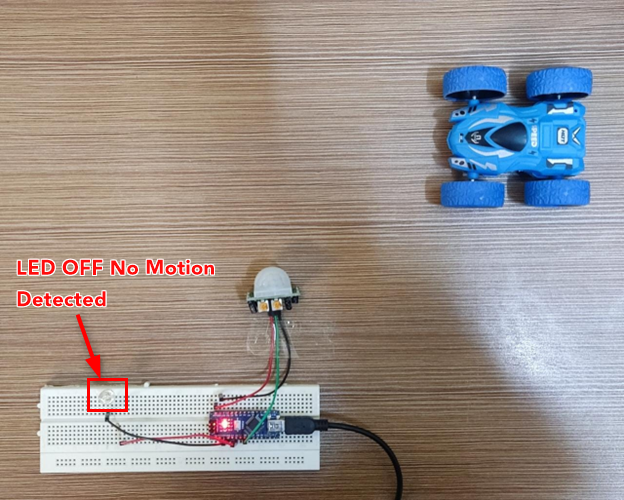
Riistvara
LED on VÄLJAS, kuna liikumist ei tuvastata.
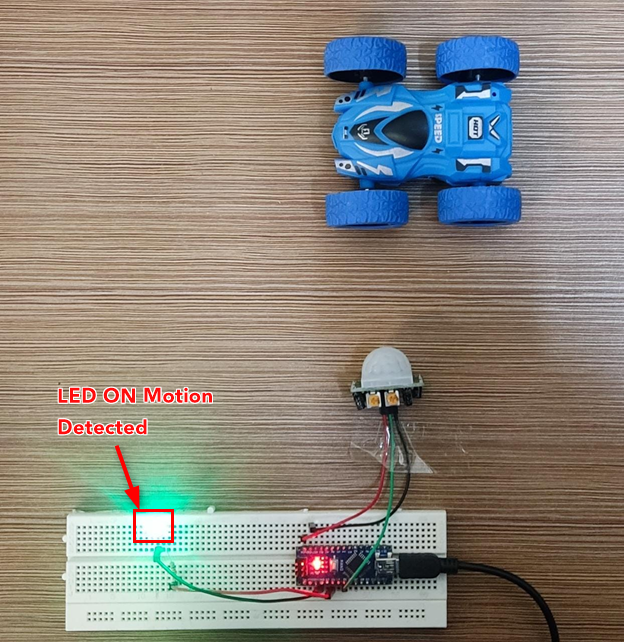
Nüüd auto liigub ja LED lülitub sisse, kui liikumist tuvastatakse.
Järeldus
Arduino Nanot saab liidestada erinevate anduritega nagu PIR. Selle anduri abil saab tuvastada mis tahes objekti liikumist. Arduinoga PIR-anduril on mitu rakendust, näiteks koduvalvesüsteemid või tänavavalgustus. See artikkel hõlmab täielikku Arduino koodi ja objekti liikumise tuvastamise samme.